视频水印消除:Transformer大法好(二)
改进之前的模型,加入多尺度的transformer,效果极佳

VPN 挂了怎么办?利用 SSH 隧道穿透内网远程访问群晖 NAS
SSH隧道穿透内网转发
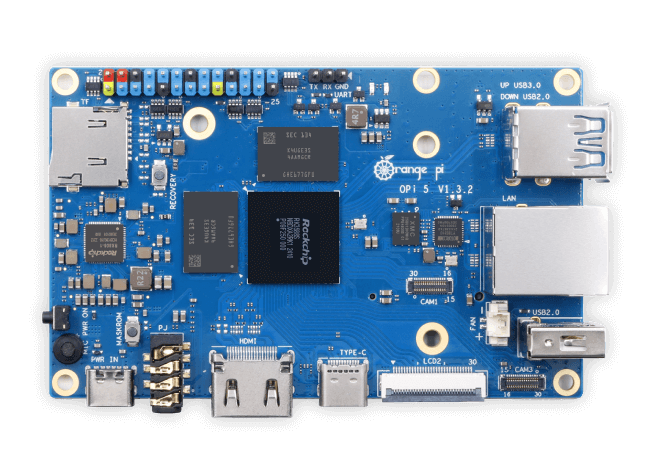
香橙派5(RK3588)AI模型推理
使用RK3588的NPU进行图像恢复模型的运行部署
毫米波雷达试验车
简介开发环境概述由于毫米波雷达的驱动程序必须在x86架构的cpu上运行,因此无法使用原计划的NX或orangepi5,在电脑本地进行开发。如果无需使用显卡CUDA加速,使用VMware即可
win11系统下使用docker安装ros2的foxy-desktop镜像进行开发
docker使用基础
获取ROS2官方镜像
1docker pull osrf/ros:foxy-desktop
创建并启动ROS2容器
12345678910111213docker run -td --name=ros2 --net=host osrf/ros:foxy-desktop-i: 交互式操作。启动容器立即进入容器,输入exit后容器退出-t: 终端-d: 后台运行。启动容器返回容器ID不会进入容器,容器在后台运行--name: 自定义容器名称。在实际操作时也可以用容器id的前几位--net:网络模式桥接模式(Bridge):默认模式,容器通过虚拟网桥 docker0 进行通信主机模式(Host):容器直接使用主机的网络接口和 IP 地址,性能较好,但隔离性较差无网络模式(None):容器没有网络能力, ...
视频水印消除:U-Net结构入门深度学习(一)
用于消除去西藏的无人机视频素材的osd数据。以及最近的情况(好几个月没有更新文章啦)
本科毕业设计论文:巷道移动机器人SLAM技术研究
计划完成的任务目标
制作一台移动机器人
使用三维激光雷达和毫米波雷达进行建图
使用深度相机和imu数据融合进行建图和导航
三维激光雷达建图的实现(LeGO-LOAM)
算法:LeGO-LOAM
激光雷达:RS-Helios-5515
通讯连接和基本配置首先用交换机连接激光雷达和电脑,为了方便我决定在vmware中开发,系统为Ubuntu 18.04安装了ROS1-melodic。网络设置为桥接模式,系统内设置网络手动ip192.168.1.102,子网掩码255.255.255.0(雷达默认ip192.168.1.200发送udp数据包到192.168.1.102的端口6699``7788)
新建ros工作空间后src文件夹放入雷达ros驱动和雷达话题定义(驱动文档也有说明),按照里面的要求进行配置修改即可,以及LeGO-LOAM代码包,除了按照文档说明进行修改以外,还要将CMakeLists.txt第四行的c++版本14:set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++14 -O3")。
设置 ...
C++学习笔记
主要内容这篇文章是c++的学习笔记,仅作为我自己的备忘录使用,不包含我已经非常熟悉的内容,所以不适合入门看哦,最好有其他语言基础,当然我猜这玩意也没人看()
所有示例程序都是我自己重新写的简化举例可放心参考。
开发环境windows下开发:VS studio目前最新版本是2022,直接下载安装就能用,一切都已经准备好了
其他情况一些开源开发者朋友们得知我要学一遍c++,非常热情的想要教会我,并且建议我用vscode连接wsl在ubuntu虚拟机内使用clang/msvc开发
基本语法数据类型长度和范围c++标准没用固定值的规定,但是有最小标准:
short至少16位(-32,768 - 32,767)
int至少于short一样长
long至少32位(-2,147,483,648 - 2,147,483,647),且至少于int一样长
long long至少64位(-9,223,372,036,854,775,808 - 9,223,372,036,854,775,807),且至少于long一样长(有的系统不支持)
可以通过#include <climits> ...

沈阳桃仙机场SHE拍摄活动
第一次带腾龙70300出门哦